El físico misionero Guillermo E. Wurm, egresado de la Facultad de Ciencias Exactas Químicas y Naturales. Universidad Nacional de Misiones (UNaM), diseñó un prototipo de navegación autónoma con técnicas de inteligencia artificial. El proyecto que desarrolla desde el año pasado se presenta como una herramienta útil para estudiar los problemas de las plataformas móviles con sistemas inteligentes.
")
Guillermo E. Wurm, físico, egresado de la Facultad de Ciencias Exactas Químicas y Naturales – Universidad Nacional de Misiones (UNaM)
El trabajo que fue presentado en las VII edición de la Jornada de Iniciación a la Investigación y la Innovación del Comité Ejecutivo de Desarrollo e Innovación Tecnológica (CEDIT).
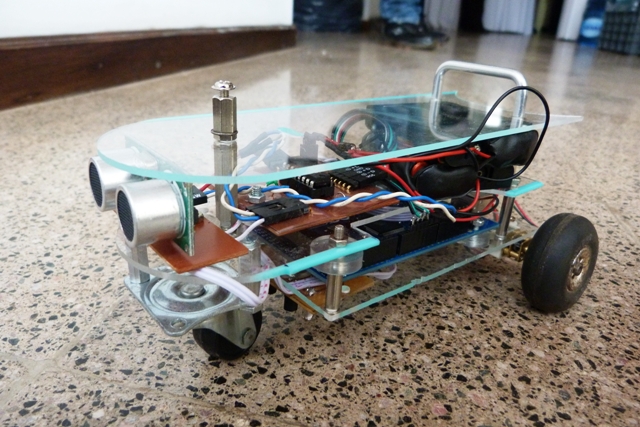
El investigador contó que el proyecto propone el diseño y construcción de prototipos de robots móviles, que incluyan dispositivos de tracción, dirección, telemetría y sistemas embebidos, que permitan la investigación de distintas técnicas de inteligencia artificial (I.A.) para la navegación autónoma. Los prototipos deberán poseer diversos sistemas sensoriales de entorno: sonares, infrarrojo, compás magnético, sensores internos de movimiento: acelerómetro y un sistema de comunicación inalámbrico. Las técnicas de I.A. utilizadas serán lógica difusa y sistemas expertos y se trabajará en los problemas clásicos de la robótica: Evasión de obstáculos y seguimiento de contornos. El primer prototipo desarrollado consiste en un robot móvil de tracción diferencial de bajo costo y dimensiones reducidas, que combina un conjunto de sensores activos y pasivos, un sistema inteligente y un dispositivo de telemetría con tecnología bluetooth.
En el informe presentado Wurm sostiene que la investigación en robótica y sus diferentes configuraciones permite desarrollar técnicas que pueden ser transferidas a la industria para la fabricación de plataformas móviles de transporte autónomas, robots móviles que realicen tareas automatizadas en el hogar o sistemas que se encarguen de realizar tareas en zonas contaminadas o de baja visibilidad. A nivel local el progreso forestal e industrial podría requerir el desarrollo de robots que se desempeñen en entornos cerrados como viveros, para la pulverización de sustancias nocivas [2]. Asimismo la inclusión de las TICs en la educación hace propicio el desarrollo de prototipos de robots que sean aplicados como material didáctico para incentivar el aprendizaje y el desarrollo de capacidades para la programación en diferentes lenguajes, la electrónica y la mecánica. Para cumplir con las necesidades mencionadas se requiere que el robot posea un sistema sensorial, para la percepción del entorno y determinación de magnitudes internas, un sistema de tracción o articulación y un sistema inteligente que permita la toma de decisión de la trayectoria a seguir cuando se encuentre con un obstáculo.
Entre los objetivos del proyecto figura la tarea de diseñar y construir un chasis que sirva de soporte al sistema de tracción y direccionamiento, sistemas embebidos, dispositivos de telemetría, fuente de energía eléctrica y sistema sensorial.
Además, desarrollar los dispositivos electrónicos que permitan vincular los distintos sistemas y enviarlos a un dispositivo de telemetría remota; desarrollar un software que permita evaluar el comportamiento y calibrar los distintos sistemas que componen el modelo y desarrollar sistemas expertos para investigar el comportamiento en los distintos problemas de la robótica móvil (evadir obstáculos, seguimiento de entornos, etc.).
Proyección
El prototipo que se desarrolló es una unidad autónoma que se caracteriza por su bajo costo, por su modularidad con acceso a todos sus dispositivos electrónicos y mecánicos y por poseer múltiples sensores con la posibilidad de agregar nuevos módulos ya que cuenta con numerosos puertos digitales, analógicos y de comunicación serial disponibles. Esta combinación lo hace ideal para la investigación y prueba de diferentes técnicas de Inteligencia Artificial en ambientes cerrados, donde se hacen presentes los problemas y dificultades propios de un entorno real.
El diseño sencillo, económico y su fácil construcción lo hacen factible para su reproducción y aplicación como material didáctico, para incentivar el aprendizaje y el desarrollo de capacidades en esta área.
Los sensores ensayados pueden implementarse en nuevos prototipos con características diferentes como un robot móvil tipo péndulo invertido, que expande el horizonte de técnicas a desarrollar.
Así también es necesaria la inclusión de un dispositivo que permita establecer que distancia se desplaza el robot en cada movimiento. Para ello se proyecta investigar la aplicación de cámaras VGA presentes en los mouse ópticos de PC.







